Motoarele electrice de curent continuu (DC) reprezintă dispozitive electromecanice fundamentale, esențiale pentru transformarea energiei electrice în energie mecanică de rotație. Aceste actuatoare folosesc interacțiunea dintre câmpurile magnetice și conductori pentru a genera o mișcare unghiulară continuă, utilizată într-o gamă largă de aplicații, de la pompe și ventilatoare la vehicule și robotică.
Principii de Funcționare ale Motoarelor DC
La baza funcționării unui motor DC stă principiul transformării energiei electrice în energie mecanică. Acest proces implică crearea unui câmp magnetic prin intermediul unui stator (partea staționară) și a unui rotor (partea rotativă). Curentul electric care circulă prin conductorii rotorului, interacționând cu câmpul magnetic al statorului, generează o forță electromagnetică ce determină rotația.
Motorul DC de bază este alcătuit din două componente principale: statorul, care este fix, și rotorul, care se rotește. Câmpul magnetic al statorului poate fi generat fie prin utilizarea unor magneți permanenți, fie prin intermediul unor bobine de excitație. Pe rotor se află bobinele prin care circulă curentul electric, interacționând cu câmpul statorului pentru a produce mișcarea de rotație.
Un element crucial în funcționarea motoarelor DC cu perii este comutatorul. Acesta, împreună cu periile, permite inversarea direcției curentului în bobinele rotorului la momentul potrivit, asigurând o rotație continuă și o singură direcție a cuplului. Viteza de rotație a motorului este determinată în principal de tensiunea DC aplicată, în timp ce cuplul de ieșire este influențat de curentul care traversează înfășurările motorului.

Tipuri de Motoare de Curent Continuu
În funcție de modul de generare a câmpului magnetic și de mecanismul de comutare, motoarele DC pot fi clasificate în mai multe tipuri:
1. Motoare DC cu Perii (Brushed DC Motors)
Acestea sunt cele mai vechi și mai comune tipuri de motoare DC. Ele utilizează un comutator mecanic și perii de cărbune pentru a inversa curentul în bobinele rotorului. Câmpul magnetic al statorului poate fi creat de magneți permanenți sau de bobine de excitație.
- Avantaje: Cost redus, control simplu al vitezei, construcție robustă.
- Dezavantaje: Uzura periilor și a comutatorului, necesită întreținere periodică, generare de scântei și zgomot electric, ceea ce poate afecta alte componente electronice.
Motoarele DC cu perii sunt frecvent utilizate în aplicații unde costul și simplitatea sunt prioritare, cum ar fi în jucării, electrocasnice mici, unelte electrice și anumite componente auto.
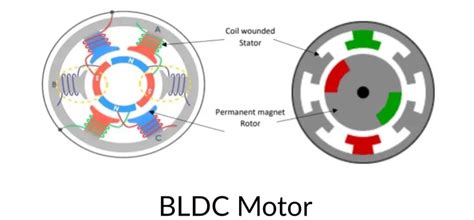
2. Motoare DC Fără Perii (Brushless DC Motors - BLDC)
Motoarele BLDC elimină utilizarea periilor și a comutatorului mecanic, înlocuindu-le cu un comutator electronic. În aceste motoare, magneții permanenți se află de obicei pe rotor, iar bobinele pe stator. Comutarea electronică a curentului în bobinele statorului, bazată pe poziția rotorului (detectată de senzori cu efect Hall sau alte metode), generează câmpul magnetic rotativ necesar pentru a antrena rotorul.
- Avantaje: Durată de viață lungă, fiabilitate ridicată, eficiență sporită, zgomot electric redus, întreținere minimă, control precis al vitezei și cuplului.
- Dezavantaje: Cost inițial mai ridicat, necesită circuite de control electronice mai complexe.
Datorită avantajelor lor, motoarele BLDC sunt din ce în ce mai utilizate în aplicații precum calculatoare (ventilatoare), vehicule electrice, drone, aparate electrocasnice moderne (aspiratoare, mașini de spălat, frigidere), echipamente medicale și robotică avansată.
3. Servomotoare DC
Un servomotor DC este, în esență, un motor DC cu perii (sau, mai recent, un motor BLDC) echipat cu un sistem de feedback (de obicei un potențiometru, un encoder sau un resolver) și un reductor. Acest sistem permite controlul precis al poziției unghiulare a arborelui de ieșire.
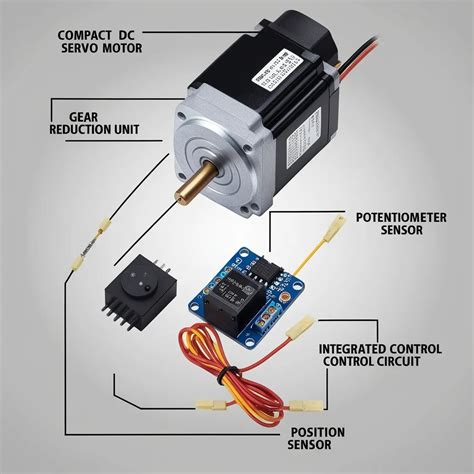
Servomotoarele funcționează într-un sistem cu buclă închisă, unde un circuit de control compară poziția dorită cu poziția actuală a arborelui și ajustează curentul furnizat motorului pentru a corecta eventualele erori.
- Aplicații: Controlul pozițional în robotică, modele RC (avioane, mașini), automatizări industriale, echipamente de imprimare și scanare.
Structura Motoarelor DC
Indiferent de tipul specific, motoarele DC au o structură de bază comună, compusă din:
Statorul
Statorul este partea staționară a motorului și are rolul principal de a genera câmpul magnetic. Acesta poate include:
- Polii magnetici principali: Creați prin miezuri de fier și bobine de excitație (în motoarele cu bobinaj) sau prin magneți permanenți (în motoarele cu magneți permanenți).
- Poloare de comutație (interpoli): Utilizate în motoarele cu perii pentru a îmbunătăți comutația și a reduce scânteile.
- Carcasa (Cadrul): Susține componentele statorului și contribuie la circuitul magnetic.
- Dispozitivele cu perii: În motoarele cu perii, acestea includ perii de cărbune, suporturile acestora și mecanismele de presare, responsabile pentru transferul curentului către comutator.
Rotorul (Armătura)
Rotorul este piesa rotativă a motorului, responsabilă pentru generarea cuplului electromagnetic și a forței electromotoare induse. Componentele sale includ:
- Miezul armăturii: Realizat din foi subțiri de oțel siliconat pentru a minimiza pierderile prin curenți turbionari și histerezis. Acesta este fixat pe arbore și prezintă crestături pentru bobinaj.
- Bobinajul armăturii: Ansamblul de bobine prin care circulă curentul, generând câmpul magnetic rotativ (în motoarele cu perii) sau fiind antrenat de câmpul statorului (în motoarele BLDC).
- Comutatorul: Un element esențial în motoarele cu perii, compus din segmente de cupru izolate, care inversează direcția curentului în bobinele armăturii pe măsură ce aceasta se rotește.
- Arborele rotativ: Piesa centrală pe care este montat rotorul și pe care se transmite mișcarea mecanică.

Controlul și Reglarea Motoarelor DC
Controlul motoarelor DC se poate realiza prin diverse metode, în funcție de aplicație și de tipul motorului:
Control Liniar
Cea mai simplă formă de control implică utilizarea unui tranzistor (sau o pereche Darlington) ca un comutator pentru a varia tensiunea aplicată motorului. Prin modificarea curentului de bază al tranzistorului, se poate controla cantitatea de tensiune care ajunge la motor, reglând astfel viteza.
Modulația Lățimii Impulsului (PWM)
Această tehnică implică comutarea rapidă a curentului motorului între starea "ON" și "OFF" la o frecvență suficient de înaltă. Raportul dintre timpul în care curentul este "ON" (tON) și durata totală a ciclului (tON + tOFF), cunoscut ca factor de umplere (Duty Cycle), determină valoarea medie a tensiunii aplicate motorului și, implicit, viteza sa de rotație.
Formula pentru tensiunea medie de ieșire este:
Vmedie = β x Vsursă
unde β este factorul de umplere (Duty Cycle).
PWM oferă un control eficient al vitezei, minimizând pierderile de putere comparativ cu controlul liniar.
Modulația în Frecvență a Impulsului (PFM)
O altă metodă de control al vitezei este prin variația frecvenței impulsurilor aplicate motorului, menținând în același timp factorul de umplere constant.
Specificații Tehnice Importante la Alegerea unui Motor DC
Selectarea corectă a unui motor DC pentru o aplicație specifică necesită înțelegerea mai multor parametri tehnici:
- Tensiunea nominală: Tensiunea la care motorul funcționează cu eficiență maximă.
- Viteza fără sarcină: Viteza maximă de rotație a arborelui în absența oricărei sarcini.
- Puterea nominală: Puterea mecanică pe care motorul o poate furniza continuu.
- Cuplul de blocare (Stall Torque): Cuplul maxim pe care îl poate genera motorul atunci când arborele este blocat. Este important ca motorul să nu opereze la acest cuplu pentru perioade îndelungate.
- Curentul de blocare (Stall Current): Curentul maxim absorbit de motor în condiții de blocare.
- Cuplul: Calculat ca forța înmulțită cu distanța (exprimat în Newton-metri, Nm).
Producătorii oferă adesea diagrame și specificații detaliate, inclusiv curbe de tensiune vs. viteză și cuplu vs. curent, care sunt esențiale pentru o selecție informată.